VIO-SLAM using Video and IMU
Visual Inertial Odometry (VIO) techniques can be used to perform Simultaneous Localization and Mapping (SLAM) to aid robotics navigate previous unseen and unknown environments using only visual camera inputs and an inertial measurement unit.
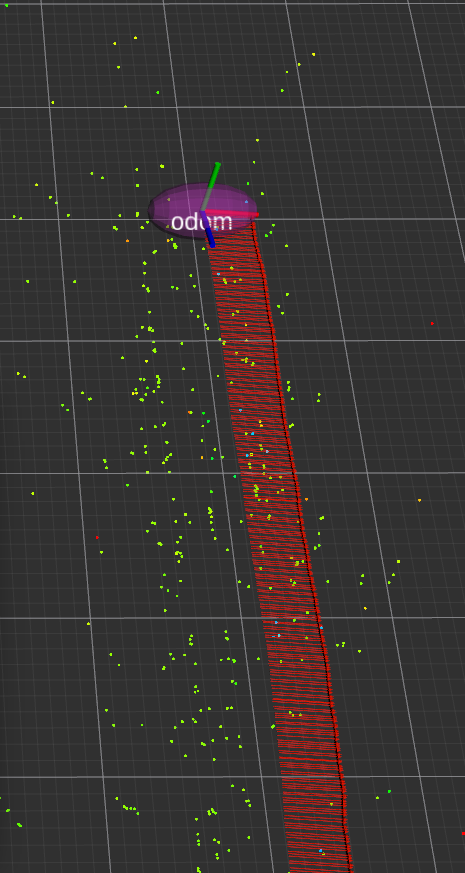
This techniques allows a robot to navigate and operate in an environment without GPS.